Тренировка модели RTMDet в MMDetection и MMYOLO
RTMDet - является современной моделью компьютерного зрения, которую можно применять для детектирования объектов (Rect и RotatedRect) и сегментации. Реализация пока реализована в фреймворке MMDetection. Заявленное качество модели (см. изображение ниже) лучше современных моделей Yolo5-8, однако лицензия на RTMDet - Apache 2.0, что позволяет использовать ее без проблем в коммерческих целях.
![222087414-168175cc-dae6-4c5c-a8e3-3109a152dd19[1]](https://recog.ru/wp-content/uploads/2023/08/222087414-168175cc-dae6-4c5c-a8e3-3109a152dd191.png "222087414-168175cc-dae6-4c5c-a8e3-3109a152dd19[1]")
Инсталляция
Способы:
- Воспользоваться примером, указанным в Colab ноутбуке.
- Поднять докер, из указанной в выше ссылке на MMYolo
Я использовал докер и моя инициализация свелась к следующему:
import os
HOME = os.getcwd()
print("HOME:", HOME)
!git clone https://github.com/open-mmlab/mmyolo.git
%cd {HOME}/mmyolo
Конфигурации
Конфигурации можно посмотреть здесь:
https://github.com/open-mmlab/mmyolo/tree/main/configs/rtmdet
| Model | size | Params(M) | FLOPs(G) | TRT-FP16-Latency(ms) | box AP | TTA box AP | Config | Download |
|---|---|---|---|---|---|---|---|---|
| RTMDet-tiny | 640 | 4.8 | 8.1 | 0.98 | 41.0 | 42.7 | config | model | log |
| RTMDet-tiny * | 640 | 4.8 | 8.1 | 0.98 | 41.8 (+0.8) | 43.2 (+0.5) | config | model | log |
| RTMDet-s | 640 | 8.89 | 14.8 | 1.22 | 44.6 | 45.8 | config | model | log |
| RTMDet-s * | 640 | 8.89 | 14.8 | 1.22 | 45.7 (+1.1) | 47.3 (+1.5) | config | model | log |
| RTMDet-m | 640 | 24.71 | 39.27 | 1.62 | 49.3 | 50.9 | config | model | log |
| RTMDet-m * | 640 | 24.71 | 39.27 | 1.62 | 50.2 (+0.9) | 51.9 (+1.0) | config | model | log |
| RTMDet-l | 640 | 52.3 | 80.23 | 2.44 | 51.4 | 53.1 | config | model | log |
| RTMDet-l * | 640 | 52.3 | 80.23 | 2.44 | 52.3 (+0.9) | 53.7 (+0.6) | config | model | log |
| RTMDet-x | 640 | 94.86 | 141.67 | 3.10 | 52.8 | 54.2 | config | model | log |
Инициализация
import cv2
import os
import json
import roboflow
import torch
import random
import supervision as sv
import numpy as np
from mmdet.apis import init_detector, inference_detector
Загрузка предобученной модели и тестового изображения:
!mkdir -p {HOME}/weights
!wget -P {HOME}/weights -q https://download.openmmlab.com/mmyolo/v0/rtmdet/rtmdet_l_syncbn_fast_8xb32-300e_coco/rtmdet_l_syncbn_fast_8xb32-300e_coco_20230102_135928-ee3abdc4.pth
!ls -lh {HOME}/weights
!mkdir -p {HOME}/data
!wget -P {HOME}/data -q https://media.roboflow.com/notebooks/examples/dog.jpeg
!ls -lh {HOME}/data
Установка устройства обучения и путей
DEVICE = torch.device('cuda:0' if torch.cuda.is_available() else 'cpu')
CONFIG_PATH = f"{HOME}/mmyolo/configs/rtmdet/rtmdet_l_syncbn_fast_8xb32-300e_coco.py"
WEIGHTS_PATH = f"{HOME}/weights/rtmdet_l_syncbn_fast_8xb32-300e_coco_20230102_135928-ee3abdc4.pth"
Проверка работы предобученной модели
Инициализация детектора:
model = init_detector(CONFIG_PATH, WEIGHTS_PATH, device=DEVICE)
Запуск распознавания одного изображения:
IMAGE_PATH = f"{HOME}/data/dog.jpeg"
image = cv2.imread(IMAGE_PATH)
result = inference_detector(model, image)
Вывод изображения на экран можно сделать как в примере в Colab:
detections = detections[detections.confidence > 0.3].with_nms()
box_annotator = sv.BoxAnnotator()
annotated_image = box_annotator.annotate(image.copy(), detections)
sv.plot_image(image=annotated_image, size=(10, 10))

Но в docker был какой-то конфликт версий для supervision и я сделал просто с VISUALIZERS.
from mmdet.registry import VISUALIZERS
visualizer = VISUALIZERS.build(model.cfg.visualizer)
visualizer.dataset_meta = model.dataset_meta
visualizer.add_datasample(
'result',
image,
data_sample=result,
draw_gt=False,
wait_time=0,
)
visualizer.show()
Подготовка данных
Используем те же данные, что и в примере Colab и загружаем их с RoboFlow:
!mkdir -p {HOME}/mmyolo/data
%cd {HOME}/mmyolo/data
roboflow.login()
rf = roboflow.Roboflow()
project = rf.workspace("roboflow-jvuqo").project("football-players-detection-3zvbc")
dataset = project.version(2).download("coco-mmdetection")
Обучение
Устанавливаем количество эпох и размер пакетов:
BATCH_SIZE = 8
MAX_EPOCHS = 50
Настраиваем конфигурационный файл:
CUSTOM_CONFIG_PATH = f"{HOME}/mmyolo/configs/rtmdet/custom.py"
CUSTOM_CONFIG = f"""
_base_ = ['../_base_/default_runtime.py', '../_base_/det_p5_tta.py']
# ========================Frequently modified parameters======================
# -----data related-----
data_root = '{dataset.location}/'
train_ann_file = 'train/_annotations.coco.json'
train_data_prefix = 'train/'
val_ann_file = 'valid/_annotations.coco.json'
val_data_prefix = 'valid/'
class_name = {tuple(sorted(project.classes.keys()))}
num_classes = {len(project.classes)}
metainfo = dict(classes=class_name, palette=[(20, 220, 60)])
train_batch_size_per_gpu = {BATCH_SIZE}
# Worker to pre-fetch data for each single GPU during training
train_num_workers = 4
# persistent_workers must be False if num_workers is 0.
persistent_workers = True
# -----train val related-----
# Base learning rate for optim_wrapper. Corresponding to 8xb16=64 bs
base_lr = 0.004
max_epochs = {MAX_EPOCHS} # Maximum training epochs
# Change train_pipeline for final 20 epochs (stage 2)
num_epochs_stage2 = 20
model_test_cfg = dict(
# The config of multi-label for multi-class prediction.
multi_label=True,
# The number of boxes before NMS
nms_pre=30000,
score_thr=0.001, # Threshold to filter out boxes.
nms=dict(type='nms', iou_threshold=0.65), # NMS type and threshold
max_per_img=300) # Max number of detections of each image
# ========================Possible modified parameters========================
# -----data related-----
img_scale = (640, 640) # width, height
# ratio range for random resize
random_resize_ratio_range = (0.1, 2.0)
# Cached images number in mosaic
mosaic_max_cached_images = 40
# Number of cached images in mixup
mixup_max_cached_images = 20
# Dataset type, this will be used to define the dataset
dataset_type = 'YOLOv5CocoDataset'
# Batch size of a single GPU during validation
val_batch_size_per_gpu = 32
# Worker to pre-fetch data for each single GPU during validation
val_num_workers = 10
# Config of batch shapes. Only on val.
batch_shapes_cfg = dict(
type='BatchShapePolicy',
batch_size=val_batch_size_per_gpu,
img_size=img_scale[0],
size_divisor=32,
extra_pad_ratio=0.5)
# -----model related-----
# The scaling factor that controls the depth of the network structure
deepen_factor = 1.0
# The scaling factor that controls the width of the network structure
widen_factor = 1.0
# Strides of multi-scale prior box
strides = [8, 16, 32]
norm_cfg = dict(type='BN') # Normalization config
# -----train val related-----
lr_start_factor = 1.0e-5
dsl_topk = 13 # Number of bbox selected in each level
loss_cls_weight = 1.0
loss_bbox_weight = 2.0
qfl_beta = 2.0 # beta of QualityFocalLoss
weight_decay = 0.05
# Save model checkpoint and validation intervals
save_checkpoint_intervals = 10
# validation intervals in stage 2
val_interval_stage2 = 1
# The maximum checkpoints to keep.
max_keep_ckpts = 3
# single-scale training is recommended to
# be turned on, which can speed up training.
env_cfg = dict(cudnn_benchmark=True)
# ===============================Unmodified in most cases====================
# https://mmengine.readthedocs.io/en/latest/api/visualization.html
_base_.visualizer.vis_backends = [
dict(type='LocalVisBackend'), #
dict(type='TensorboardVisBackend'),]
model = dict(
type='YOLODetector',
data_preprocessor=dict(
type='YOLOv5DetDataPreprocessor',
mean=[103.53, 116.28, 123.675],
std=[57.375, 57.12, 58.395],
bgr_to_rgb=False),
backbone=dict(
type='CSPNeXt',
arch='P5',
expand_ratio=0.5,
deepen_factor=deepen_factor,
widen_factor=widen_factor,
channel_attention=True,
norm_cfg=norm_cfg,
act_cfg=dict(type='SiLU', inplace=True)),
neck=dict(
type='CSPNeXtPAFPN',
deepen_factor=deepen_factor,
widen_factor=widen_factor,
in_channels=[256, 512, 1024],
out_channels=256,
num_csp_blocks=3,
expand_ratio=0.5,
norm_cfg=norm_cfg,
act_cfg=dict(type='SiLU', inplace=True)),
bbox_head=dict(
type='RTMDetHead',
head_module=dict(
type='RTMDetSepBNHeadModule',
num_classes=num_classes,
in_channels=256,
stacked_convs=2,
feat_channels=256,
norm_cfg=norm_cfg,
act_cfg=dict(type='SiLU', inplace=True),
share_conv=True,
pred_kernel_size=1,
featmap_strides=strides),
prior_generator=dict(
type='mmdet.MlvlPointGenerator', offset=0, strides=strides),
bbox_coder=dict(type='DistancePointBBoxCoder'),
loss_cls=dict(
type='mmdet.QualityFocalLoss',
use_sigmoid=True,
beta=qfl_beta,
loss_weight=loss_cls_weight),
loss_bbox=dict(type='mmdet.GIoULoss', loss_weight=loss_bbox_weight)),
train_cfg=dict(
assigner=dict(
type='BatchDynamicSoftLabelAssigner',
num_classes=num_classes,
topk=dsl_topk,
iou_calculator=dict(type='mmdet.BboxOverlaps2D')),
allowed_border=-1,
pos_weight=-1,
debug=False),
test_cfg=model_test_cfg,
)
train_pipeline = [
dict(type='LoadImageFromFile', backend_args=_base_.backend_args),
dict(type='LoadAnnotations', with_bbox=True),
dict(
type='Mosaic',
img_scale=img_scale,
use_cached=True,
max_cached_images=mosaic_max_cached_images,
pad_val=114.0),
dict(
type='mmdet.RandomResize',
# img_scale is (width, height)
scale=(img_scale[0] * 2, img_scale[1] * 2),
ratio_range=random_resize_ratio_range,
resize_type='mmdet.Resize',
keep_ratio=True),
dict(type='mmdet.RandomCrop', crop_size=img_scale),
dict(type='mmdet.YOLOXHSVRandomAug'),
dict(type='mmdet.RandomFlip', prob=0.5),
dict(type='mmdet.Pad', size=img_scale, pad_val=dict(img=(114, 114, 114))),
dict(
type='YOLOv5MixUp',
use_cached=True,
max_cached_images=mixup_max_cached_images),
dict(type='mmdet.PackDetInputs')
]
train_pipeline_stage2 = [
dict(type='LoadImageFromFile', backend_args=_base_.backend_args),
dict(type='LoadAnnotations', with_bbox=True),
dict(
type='mmdet.RandomResize',
scale=img_scale,
ratio_range=random_resize_ratio_range,
resize_type='mmdet.Resize',
keep_ratio=True),
dict(type='mmdet.RandomCrop', crop_size=img_scale),
dict(type='mmdet.YOLOXHSVRandomAug'),
dict(type='mmdet.RandomFlip', prob=0.5),
dict(type='mmdet.Pad', size=img_scale, pad_val=dict(img=(114, 114, 114))),
dict(type='mmdet.PackDetInputs')
]
test_pipeline = [
dict(type='LoadImageFromFile', backend_args=_base_.backend_args),
dict(type='YOLOv5KeepRatioResize', scale=img_scale),
dict(
type='LetterResize',
scale=img_scale,
allow_scale_up=False,
pad_val=dict(img=114)),
dict(type='LoadAnnotations', with_bbox=True, _scope_='mmdet'),
dict(
type='mmdet.PackDetInputs',
meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
'scale_factor', 'pad_param'))
]
train_dataloader = dict(
batch_size=train_batch_size_per_gpu,
num_workers=train_num_workers,
persistent_workers=persistent_workers,
pin_memory=True,
collate_fn=dict(type='yolov5_collate'),
sampler=dict(type='DefaultSampler', shuffle=True),
dataset=dict(
type=dataset_type,
data_root=data_root,
metainfo=metainfo,
ann_file=train_ann_file,
data_prefix=dict(img=train_data_prefix),
filter_cfg=dict(filter_empty_gt=True, min_size=32),
pipeline=train_pipeline))
val_dataloader = dict(
batch_size=val_batch_size_per_gpu,
num_workers=val_num_workers,
persistent_workers=persistent_workers,
pin_memory=True,
drop_last=False,
sampler=dict(type='DefaultSampler', shuffle=False),
dataset=dict(
type=dataset_type,
data_root=data_root,
metainfo=metainfo,
ann_file=val_ann_file,
data_prefix=dict(img=val_data_prefix),
test_mode=True,
batch_shapes_cfg=batch_shapes_cfg,
pipeline=test_pipeline))
test_dataloader = val_dataloader
# Reduce evaluation time
val_evaluator = dict(
type='mmdet.CocoMetric',
proposal_nums=(100, 1, 10),
ann_file=data_root + val_ann_file,
metric='bbox')
test_evaluator = val_evaluator
# optimizer
optim_wrapper = dict(
type='OptimWrapper',
optimizer=dict(type='AdamW', lr=base_lr, weight_decay=weight_decay),
paramwise_cfg=dict(
norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
# learning rate
param_scheduler = [
dict(
type='LinearLR',
start_factor=lr_start_factor,
by_epoch=False,
begin=0,
end=1000),
dict(
# use cosine lr from 150 to 300 epoch
type='CosineAnnealingLR',
eta_min=base_lr * 0.05,
begin=max_epochs // 2,
end=max_epochs,
T_max=max_epochs // 2,
by_epoch=True,
convert_to_iter_based=True),
]
# hooks
default_hooks = dict(
checkpoint=dict(
type='CheckpointHook',
interval=save_checkpoint_intervals,
max_keep_ckpts=max_keep_ckpts # only keep latest 3 checkpoints
))
custom_hooks = [
dict(
type='EMAHook',
ema_type='ExpMomentumEMA',
momentum=0.0002,
update_buffers=True,
strict_load=False,
priority=49),
dict(
type='mmdet.PipelineSwitchHook',
switch_epoch=max_epochs - num_epochs_stage2,
switch_pipeline=train_pipeline_stage2)
]
train_cfg = dict(
type='EpochBasedTrainLoop',
max_epochs=max_epochs,
val_interval=save_checkpoint_intervals,
dynamic_intervals=[(max_epochs - num_epochs_stage2, val_interval_stage2)])
val_cfg = dict(type='ValLoop')
test_cfg = dict(type='TestLoop')
"""
with open(CUSTOM_CONFIG_PATH, 'w') as file:
file.write(CUSTOM_CONFIG)
Собственно большая часть здесь копировано с large модели. Что было настроено:
data_root = '{dataset.location}/'
train_ann_file = 'train/_annotations.coco.json'
train_data_prefix = 'train/'
val_ann_file = 'valid/_annotations.coco.json'
val_data_prefix = 'valid/'
class_name = {tuple(sorted(project.classes.keys()))}
num_classes = {len(project.classes)}
metainfo = dict(classes=class_name, palette=[(20, 220, 60)])
train_batch_size_per_gpu = {BATCH_SIZE}
max_epochs = {MAX_EPOCHS} # Maximum training epochs
Запускаем обучение:
%cd {HOME}/mmyolo
!python tools/train.py configs/rtmdet/custom.py
Время обучения:
GPU NVIDIA A100 - 21 минута
T4 GPU - 1 час 38 минут
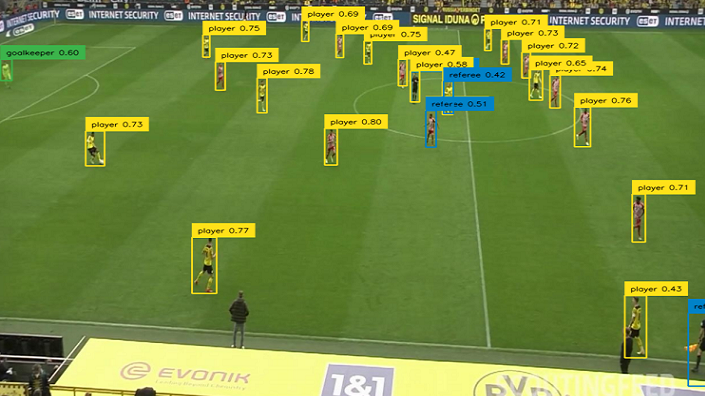
Проверка
CUSTOM_WEIGHTS_PATH = f"{HOME}/mmyolo/work_dirs/custom/epoch_{MAX_EPOCHS}.pth"
model = init_detector(CUSTOM_CONFIG_PATH, CUSTOM_WEIGHTS_PATH, device=DEVICE)
ds = sv.DetectionDataset.from_coco(
images_directory_path=f"{dataset.location}/test",
annotations_path=f"{dataset.location}/test/_annotations.coco.json",
)
images = list(ds.images.values())
Выводим результат, одним из способов описанных выше: